Konstrukcja robota murarskiego z założeniami sterowania i autonomii, analiza istniejącego rozwiązania, rekomendacja ścieżki „od nowa”, zdefiniowanie wymagań i etapów prototypowania
Projekt obejmujący obszary mechaniki, elektroniki, automatyki oraz oprogramowania wbudowanego i zewnętrznego, przygotowanie koncepcji, plan iteracyjnego rozwoju, wsparcie w doborze rozwiązania technicznego. Projektowanie maszyn i pojazdów autonomicznych
Kontekst
Współczesne budownictwo oczekuje powtarzalnej jakości, tempa realizacji i większego bezpieczeństwa pracy. Projekt zakłada stworzenie robota, który muruje ściany zewnętrzne i wewnętrzne, zachowując zgodne z normami parametry murowania - wysoką precyzję układania, stałą spoinę i minimalizując ryzyko błędów wykonawczych..
Zaproszenie do współpracy było jednocześnie wyróżnieniem i wyzwaniem: jak zbudować system, który realnie pracuje na budowie, a nie tylko działa „w laboratorium” — i daje się obsłużyć przez standardową brygadę.
Wyzwanie projektowe
Robot:
- obsługiwany przez 2 osoby,
- łatwy w transporcie i serwisie,
- zgodny z wymaganiami budowlanymi (ciężar, gabaryty, nacisk powierzchniowy) i BHP,
- precyzyjny (równa spoina, brak szczelin, brak zabrudzeń bocznych powierzchni bloczków).
Do tego dochodziła twarda „lista realiów budowy”:
- minimalna wydajność: 45 m²/dzień (10h)
- określona masa maksymalna, szerokość, wysokość transportowa, nacisk maksymalny
- wysokość murowania: ostatnia warstwa 2,8 m,
- przeszkody: 3–4 cm,
- bloczki/pustaki o ciężarze do 25 kg+
- zasilanie budowlane - wymagania różnicowoprądowe (kluczowe ograniczenie).
W praktyce bezpieczniej było zaprojektować robota „ze ścisłymi założeniami i szeroką analizą wstępną”, by wynik procesu był zgodny z oczekiwaniami Klienta.
IDEA
Najpierw stabilny szkielet mechaniczny, potem autonomia
Podstawą podejścia było założenie, że konstrukcja mechaniczna powstaje jako fundament w Fazie 0, a kolejne funkcje (czujniki, algorytmy, samodiagnostyka) są dokładane iteracyjnie. Dzięki temu:
wcześniej powstaje fizyczny prototyp,
testy napędów/nośności/dynamiki są możliwe od razu,
klient widzi postęp w sposób transparentny i może podejmować decyzje na twardych danych.
PROCES PROJEKTOWY
Prace oparto o iteracyjne podejście (BUILD → MEASURE → LEARN), gdzie każda faza kończy się konkretnym wynikiem: prototypem, testami i analizą wydajności.
1. Diagnoza i analiza istniejącego rozwiązania
Ocena masy, zasilania, węzłów konstrukcyjnych i ryzyk. Wniosek: modyfikacja oznaczałaby projekt „od zera”
2. Specyfikacja wymagań
Spis warunków pracy, ograniczeń budowy, norm i parametrów jakościowych.
3. Research rozwiązań rynkowych
Przegląd istniejących koncepcji robotów murarskich i rozwiązań transportowo-manipulacyjnych.
4. Wybór kierunku technicznego
Rozważenie dwóch podejść: ramię własnej konstrukcji vs cobot jako baza.
5. Roadmapa prototypowania i wzrost autonomii
Zdefiniowanie etapów automatyzacji od Faz 0–3.
REZULTAT
Koncepcja robota murarskiego gotowa do iteracyjnego prototypowania
W wyniku prac zdefiniowano:
specyfikację wymagań technicznych i funkcjonalnych, osadzoną w realiach budowy (gabaryty, masa, zasilanie, BHP, materiał),
architekturę rozwoju w fazach (od sterowania ręcznego do pełnej automatyzacji),
oraz kierunek doboru rozwiązania dla „ramienia” robota: własna konstrukcja lub cobot jako baza.
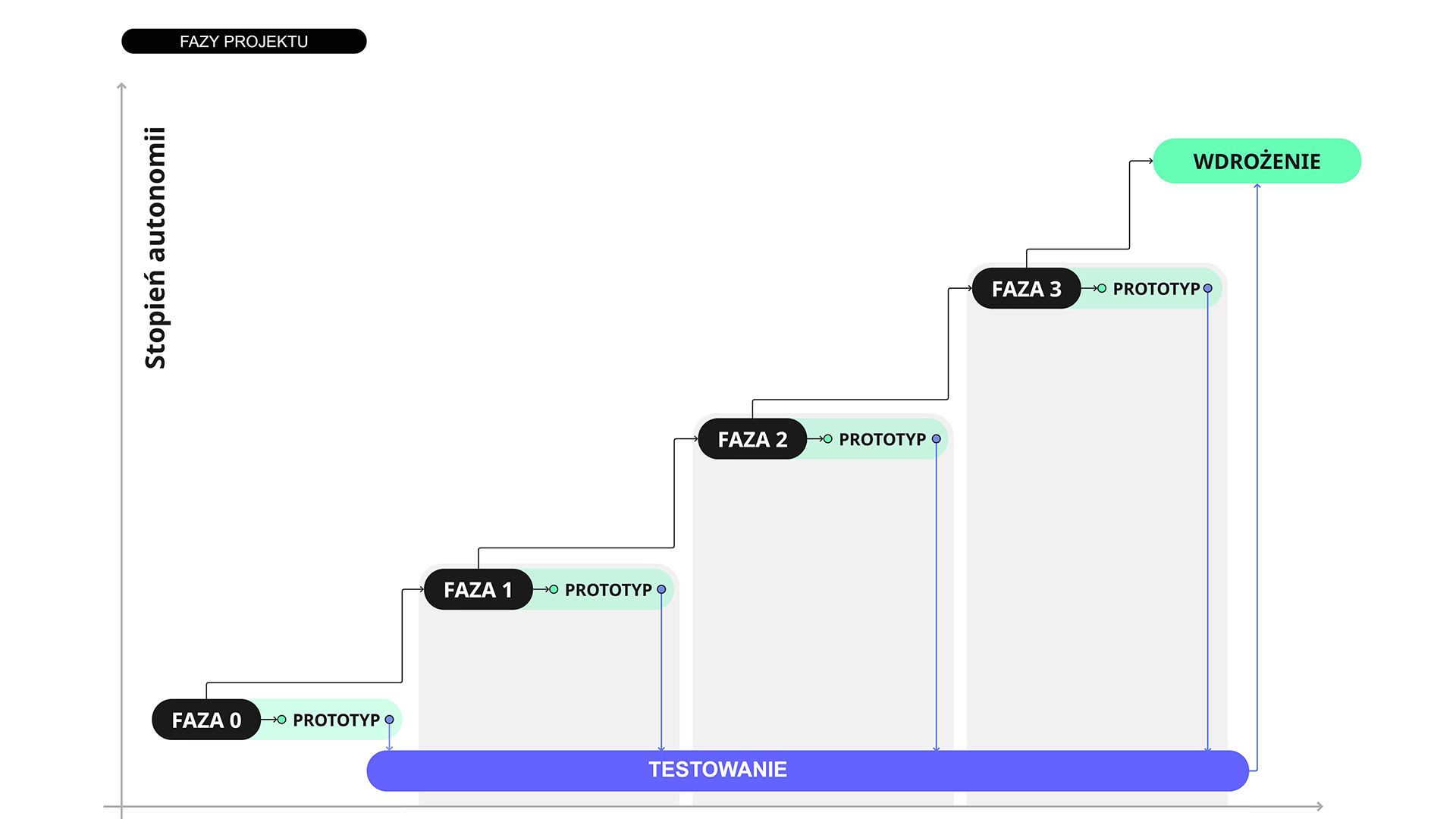
Fazy automatyzacji i autonomii (0 → 3)
Zamiast próbować „wszystko naraz”, zaplanowano rozwój kompetencji robota krok po kroku:
Faza 0 — prototyp bazowy (sterowanie ręczne)
Robot w trybie ręcznym, z ręcznym pozycjonowaniem i obsługą procesu (pobieranie, wybór bloczka, zaprawa, układanie, repozycjonowanie).
Faza 1 — pierwsze wsparcie automatyczne
Układanie może działać automatycznie, ale z ręcznym pozycjonowaniem; pozostałe elementy wciąż wspierane przez operatora.
Faza 2 — automatyzacja wybranych czynności + kontrola operatora
Wybrane obszary automatyczne (np. pobieranie/układanie), repozycjonowanie robota autonomiczne z koniecznością ręcznego potwierdzenia pozycji.
Faza 3 — prototyp o wysokiej autonomii
Docelowo automatyczne: pobieranie, wybór elementu, nakładanie zaprawy, układanie i repozycjonowanie.
W tym projekcie „design” oznaczał przede wszystkimprojektowanie warunków powodzenia na budowie: masy, zasilania, bezpieczeństwa, obsługi i jakości procesu murowania oraz jego bezpieczeństwa — zanim pojawi się pełna autonomia.
Kluczowe elementy rozwiązania (na poziomie koncepcji):
Zoptymalizowana masa i gabaryty pod transport i przejazdy przez otwory drzwiowe.
Ergonomia obsługi dla 2 osób (transport, rozkładanie/składanie, czyszczenie, repozycjonowanie).
Jakość murowania jako priorytet: równomiernie ułożona zaprawa klejowa gr. 3 mm, brak szczelin i zabrudzeń bocznych powierzchni.
Repozycjonowanierobota jako osobny problem projektowy (od ręcznego przez półautomatyczne po automatyczne).
Każde zgłoszenie analizujemy indywidualnie. Wkrótce skontaktuje się z Tobą odpowiednia osoba z naszego zespołu, aby porozmawiać o Twoim pomyśle i możliwych kierunkach jego realizacji.”
Potrzebujesz dobrego projektu? Skontaktuj się z nami.
Każde zgłoszenie analizujemy indywidualnie. Wkrótce skontaktuje się z Tobą odpowiednia osoba z naszego zespołu, aby porozmawiać o Twoim pomyśle i możliwych kierunkach jego realizacji.”
Dziękujemy za wiadomość!
Zajmiemy się nią jak najszybciej i wrócimy z odpowiedzią w ciągu 24 godzin.